
Thermometer bewegingsmelder en clock
Thermometer bewegingsmelder en clock
Het display laat de temperatuur en luchtvochtigheid zien en toont de trend met een pijltje omhoog of naar beneden.
Op de tweede regel staat de datum en tijd.
Het display gaat alleen 'aan' als er beweiging wordt geconstateerd.
Gemeten stroom is ongeveer 40 mA voor de gehele schakeling.

Aansuitschema
PIR Bewegingsmelder

Van onder gezien van links naar rechts
(Let op er zijn verschillende pin configuraties. Verwijder lans/cap om de pin configuratie te zien).
- Plus 5V
- Signaal naar Pin 12 Arduino Leonarde.
- Min
Signaal naar Digitaal pin 12 Arduono Leonarde
Clock DS 3231

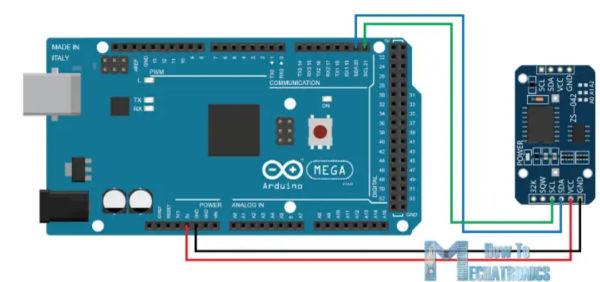
http://www.rinkydinkelectronics.com/library.php?id=73
Van links naar rechts van onderkant (niet batterij kant) gezien en laatste 4 pootjes.
- SCL naar SCL op Arduino (op Leonarde meest rechter pin)
- SDA naar SDA op Arduino (op Leonarde op een na meest rechter pin)
- Plus 3.3V
- Min
Thermometer

Van links naar rechts (gaatjes van blauwe blokje boven).
- naar pin 4 Arduino Leonarde
- Plus 3.3V
- Min
Zie https://www.roc.ovh/books/arduino/page/temperatuur-en-luchtvochtigheid
Display

Zie https://www.roc.ovh/books/arduino/page/display
Code
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <DHT.h>
#include <DS3231.h>
#define DHTPIN 4 // Pin connected to the DHT11 data pin
#define DHTTYPE DHT11 // Specify DHT11 sensor
#define SIGNAL_INTERVAL 600000 // 10 minutes
DHT dht(DHTPIN, DHTTYPE);
DS3231 myRTC;
bool century = false;
bool h12Flag;
bool pmFlag;
int count = 0;
int pirPin = 12; // Pin for the HC-S501 sensor
int pirValue;
LiquidCrystal_I2C lcd = LiquidCrystal_I2C(0x27, 16, 2);
unsigned long previousMillis = 0;
const long dhtInterval = 2000; // Interval for DHT readings
// Custom characters for the LCD arrows
byte downChar[] = {
B00000,
B00000,
B00100,
B00100,
B00100,
B10101,
B01110,
B00100
};
byte upChar[] = {
B00100,
B01110,
B10101,
B00100,
B00100,
B00100,
B00000,
B00000
};
byte degreeChar[] = {
B00110,
B01001,
B01001,
B00110,
B00000,
B00000,
B00000,
B00000
};
//------------------------------------------------------------------------------
// Generic MeasurementSensor Class Template
//------------------------------------------------------------------------------
template <typename T>
class MeasurementSensor {
private:
T measurement; // Current measurement value
int arrow; // Arrow indicator: 0 = no arrow, 1 = down, 2 = up
unsigned long arrowMillis; // Last time the arrow was updated/reset
const long signalInterval; // Time interval to reset the arrow
public:
// Constructor: initializes with an initial measurement value.
MeasurementSensor(long sigInterval, T initValue)
: measurement(initValue), arrow(0), arrowMillis(0), signalInterval(sigInterval) {}
// Update the measurement reading and determine the arrow indicator
void update(T newMeasurement, unsigned long currentMillis) {
// If the new measurement equals the previous value and the signal interval has passed, reset arrow.
if (newMeasurement == measurement && currentMillis - arrowMillis >= signalInterval) {
arrow = 0;
} else {
if (newMeasurement > measurement) {
arrow = 2; // Up arrow
arrowMillis = currentMillis;
}
if (newMeasurement < measurement) {
arrow = 1; // Down arrow
arrowMillis = currentMillis;
}
}
// If the previous value is the initial invalid value, clear the arrow indicator.
if (measurement == static_cast<T>(-99)) {
arrow = 0;
}
measurement = newMeasurement;
}
// Getters for measurement and arrow
T getMeasurement() const { return measurement; }
int getArrow() const { return arrow; }
};
//------------------------------------------------------------------------------
// Global Instances for Temperature and Humidity
//------------------------------------------------------------------------------
MeasurementSensor<float> tempSensor(SIGNAL_INTERVAL, -99.0);
MeasurementSensor<int> humiditySensor(SIGNAL_INTERVAL, -99);
void setup() {
Serial.begin(9600);
dht.begin();
delay(2000);
lcd.init();
lcd.backlight();
lcd.clear();
lcd.createChar(1, downChar);
lcd.createChar(2, upChar);
lcd.createChar(3, degreeChar);
pinMode(pirPin, INPUT);
// myRTC.setYear(2025);
// myRTC.setMonth(3);
// myRTC.setDate(20);
// myRTC.setHour(23);
// myRTC.setMinute(49);
// myRTC.setSecond(0);
}
void print2digits(int number) {
if (number < 10) {
lcd.print("0");
}
lcd.print(number, DEC);
}
void loop() {
delay(20);
// lcd.print(":");
// print2digits(myRTC.getSecond());
// Check for movement
pirValue = digitalRead(pirPin);
if (pirValue) {
lcd.backlight();
}
// Do we need to update the display?
unsigned long currentMillis = millis();
if (currentMillis - previousMillis >= dhtInterval) {
previousMillis = currentMillis;
// Update backlight based on PIR sensor
pirValue = digitalRead(pirPin);
if (!pirValue) {
lcd.noBacklight();
}
count++;
// Read new values from the DHT sensor
float newTemperature = dht.readTemperature();
int newHumidity = dht.readHumidity();
if (isnan(newTemperature) || isnan(newHumidity)) {
Serial.println("Failed to read from DHT sensor!");
return;
}
// Update our measurement sensors
tempSensor.update(newTemperature, currentMillis);
humiditySensor.update(newHumidity, currentMillis);
// Print sensor readings to the Serial Monitor
Serial.print(count);
Serial.print(", Temperature: ");
Serial.print(tempSensor.getMeasurement(), 1);
Serial.print("°C");
Serial.print(", Humidity: ");
Serial.print(humiditySensor.getMeasurement());
Serial.print("%");
Serial.println("");
Serial.println(myRTC.getSecond(), DEC);
Serial.println("");
// Update the LCD display for temperature
lcd.setCursor(0, 0);
if (tempSensor.getArrow()) {
lcd.write(tempSensor.getArrow());
} else {
lcd.print(" ");
}
lcd.print(tempSensor.getMeasurement(), 1);
lcd.write(3); // degree symbol
lcd.print("C ");
// Update the LCD display for humidity (set cursor on second row)
lcd.setCursor(12, 0);
if (humiditySensor.getArrow()) {
lcd.write(humiditySensor.getArrow());
} else {
lcd.print(" ");
}
lcd.print(humiditySensor.getMeasurement());
lcd.print("%");
lcd.setCursor(1, 1);
print2digits(myRTC.getDate());
lcd.print("-");
print2digits(myRTC.getMonth(century));
lcd.setCursor(10, 1);
print2digits(myRTC.getHour(h12Flag, pmFlag));
lcd.print(":");
print2digits(myRTC.getMinute());
}
}
Code met higest/lowest
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <DHT.h>
#include <DS3231.h>
#define DHTPIN 4 // Pin connected to the DHT11 data pin
#define DHTTYPE DHT11 // Specify DHT11 sensor
#define SIGNAL_INTERVAL 600000 // 10 minutes
DHT dht(DHTPIN, DHTTYPE);
DS3231 myRTC;
bool century = false;
bool h12Flag;
bool pmFlag;
int count = 0;
int pirPin = 12; // Pin for the HC-S501 sensor
int pirValue;
LiquidCrystal_I2C lcd = LiquidCrystal_I2C(0x27, 16, 2);
unsigned long previousMillis = 0;
const long dhtInterval = 2000; // Interval for DHT readings
// Custom characters for the LCD arrows
byte downChar[] = {
B00000,
B00000,
B00100,
B00100,
B00100,
B10101,
B01110,
B00100
};
byte upChar[] = {
B00100,
B01110,
B10101,
B00100,
B00100,
B00100,
B00000,
B00000
};
byte degreeChar[] = {
B00110,
B01001,
B01001,
B00110,
B00000,
B00000,
B00000,
B00000
};
//------------------------------------------------------------------------------
// Generic MeasurementSensor Class Template
//------------------------------------------------------------------------------
template<typename T>
class MeasurementSensor {
private:
T measurement; // Current measurement value
T lowestMeasurement;
T highestMeasurement;
int arrow; // Arrow indicator: 0 = no arrow, 1 = down, 2 = up
unsigned long arrowMillis; // Last time the arrow was updated/reset
const long signalInterval; // Time interval to reset the arrow
public:
// Constructor: initializes with an initial measurement value.
MeasurementSensor(long sigInterval, T initValue)
: measurement(initValue), arrow(0), arrowMillis(0), lowestMeasurement(0), highestMeasurement(0), signalInterval(sigInterval) {}
// Update the measurement reading and determine the arrow indicator
void update(T newMeasurement, unsigned long currentMillis) {
// If this is the first valid measurement, initialize min/max
if (lowestMeasurement == static_cast<T>(0) && highestMeasurement == static_cast<T>(0)) {
lowestMeasurement = newMeasurement;
highestMeasurement = newMeasurement;
}
// Determine highest and lowest
if (newMeasurement < lowestMeasurement) {
lowestMeasurement = newMeasurement;
}
if (newMeasurement > highestMeasurement) {
highestMeasurement = newMeasurement;
}
// If the new measurement equals the previous value and the signal interval has passed, reset arrow.
if (newMeasurement == measurement && currentMillis - arrowMillis >= signalInterval) {
arrow = 0;
} else {
if (newMeasurement > measurement) {
arrow = 2; // Up arrow
arrowMillis = currentMillis;
}
if (newMeasurement < measurement) {
arrow = 1; // Down arrow
arrowMillis = currentMillis;
}
}
// If the previous value is the initial invalid value, clear the arrow indicator.
if (measurement == static_cast<T>(-99)) {
arrow = 0;
}
measurement = newMeasurement;
}
// Getters for measurement and arrow
T getMeasurement() const {
return measurement;
}
T getLowest() const {
return lowestMeasurement;
}
T getHighest() const {
return highestMeasurement;
}
int getArrow() const {
return arrow;
}
void resetMinMax(T currentValue) {
lowestMeasurement = currentValue;
highestMeasurement = currentValue;
}
};
//------------------------------------------------------------------------------
// Global Instances for Temperature and Humidity
//------------------------------------------------------------------------------
MeasurementSensor<float> tempSensor(SIGNAL_INTERVAL, -99.0);
MeasurementSensor<int> humiditySensor(SIGNAL_INTERVAL, -99);
void setup() {
Serial.begin(9600);
dht.begin();
delay(2000);
lcd.init();
lcd.backlight();
lcd.clear();
lcd.createChar(1, downChar);
lcd.createChar(2, upChar);
lcd.createChar(3, degreeChar);
pinMode(pirPin, INPUT);
// myRTC.setYear(2025);
// myRTC.setMonth(3);
// myRTC.setDate(20);
// myRTC.setHour(10);
// myRTC.setMinute(49);
// myRTC.setSecond(0);
}
void print2digits(int number) {
if (number < 10) {
lcd.print("0");
}
lcd.print(number, DEC);
}
int lastResetHour = -1; // Initialize to an invalid hour
void loop() {
delay(20);
// lcd.print(":");
// print2digits(myRTC.getSecond());
// Check for movement
pirValue = digitalRead(pirPin);
if (pirValue) {
lcd.backlight();
}
// Do we need to update the display?
unsigned long currentMillis = millis();
if (currentMillis - previousMillis >= dhtInterval) {
previousMillis = currentMillis;
// Update backlight based on PIR sensor
pirValue = digitalRead(pirPin);
if (!pirValue) {
lcd.noBacklight();
}
count++;
// Read new values from the DHT sensor
float newTemperature = dht.readTemperature();
int newHumidity = dht.readHumidity();
if (isnan(newTemperature) || isnan(newHumidity)) {
Serial.println("Failed to read from DHT sensor!");
return;
}
// Get current hour from RTC
int currentHour = myRTC.getHour(h12Flag, pmFlag);
// Check if hour has changed
if (currentHour != lastResetHour) {
tempSensor.resetMinMax(newTemperature);
humiditySensor.resetMinMax(newHumidity);
lastResetHour = currentHour;
Serial.println("min/max values reset");
}
// Update our measurement sensors
tempSensor.update(newTemperature, currentMillis);
humiditySensor.update(newHumidity, currentMillis);
// Update the LCD display for temperature
lcd.setCursor(0, 0);
if ( count % 6 ) {
if (tempSensor.getArrow()) {
lcd.write(tempSensor.getArrow());
} else {
lcd.print(" ");
}
lcd.print(tempSensor.getMeasurement(), 1);
lcd.write(3); // degree symbol
lcd.print("C ");
} else {
lcd.print("");
lcd.print(tempSensor.getLowest(),1);
lcd.write(3);
lcd.print(" ");
lcd.print(tempSensor.getHighest(),1);
lcd.write(3);
lcd.print(" ");
}
// Update the LCD display for humidity (set cursor on second row)
if (humiditySensor.getArrow()) {
lcd.write(humiditySensor.getArrow());
} else {
lcd.print(" ");
}
lcd.print(humiditySensor.getMeasurement());
lcd.print("%");
lcd.setCursor(1, 1);
print2digits(myRTC.getDate());
lcd.print("-");
print2digits(myRTC.getMonth(century));
lcd.setCursor(10, 1);
print2digits(myRTC.getHour(h12Flag, pmFlag));
lcd.print(":");
print2digits(myRTC.getMinute());
}
}
--